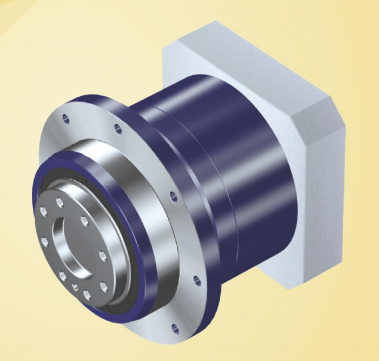
7-16智能行星变速机
又称拉铆螺母,拉帽,用于各类金属板材、管材等工业的紧固领域,广泛地使用在汽车、、铁道、制冷、电梯、关、仪器、家具、装饰等机电和轻工产品的装配上。为解决金属薄板、薄管焊接螺母易熔,基材易焊接变形,攻内螺纹易滑牙等缺点而发,它不需要攻内螺纹,不需要焊接螺母、铆接牢固效率高、使用方便。铆螺母能够有效解决空调外壳,形成长时间后黄水的问题,能有效的杜绝虚焊等问题。解决翻边自攻螺丝连接不牢固,提高可靠性,可以降低因连接而松动产生的噪音,能更加可靠、踏实,并且维修方便。提高生产效率,减少用工人数,降低人工成本。(因铆螺母采用的是冲床压群铆的方法,使单一焊接的方法一次完成,不仅效率高,还能减少用点量.)4.减少用工厂地。铆螺母代替了翻边攻丝能使材料减薄2%,节省能源铆螺母能有效解决空调外壳,长年日久,风打雨晒后流黄水的问题,能有效的杜绝虚焊等问题。解决翻边攻丝(或自攻钉)连接不牢固,提高连接的可靠性,有效降低因连接松动产生的噪音,使接地更加可靠、踏实,并且维修方便。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此 ,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
矿串轴的其他原因:
1、精密行星减速机承受正负扭矩作用时,齿厚误差、齿面不均匀磨损和过早磨损、齿背变形造成串轴。
2、齿轮螺旋角误差造成串轴。中间轴和输出轴上两半从动人字齿轮,由于实际螺旋角的误差,会使人字齿轮对中线发生变化,造成串轴。
3、精密行星减速机齿轮偏斜造成串轴。中间轴上的从动齿轮偏斜可造成串轴。齿轮是以外圆和端面进行的,而齿轮装配是以内孔的,有时内孔与外圆不同心,或者内孔与端面不垂直,就会使的齿轮与内孔中心线出现偏斜。这种偏斜的人字齿轮,其对中线所在的平面与轴线不垂直,当齿轮旋转一周时,对中线上的某一点将会发生轴向往复串动一次,迫使输入轴也轴向往复串动一次。在实际传动中,由于两半从动齿轮的偏斜程度不同,对于输入轴来讲,产生轴向串动是中间轴上两半从动齿轮不同偏斜程度综合作用的结果。此外,输出轴上的从动齿轮,由于齿轮偏斜也同样造成串动,但是由于输出轴在轴向是固定的,就迫使中间轴,进而迫使精密行星减速机输入轴串动。
3、如何控制伺服马达 标准的微型伺服马达有三条控制线,分别为:电源、地及控制。电源线与地线用于内部的直流马达及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源的比例必须合理。 4、伺服马达的电源引线 电源引线有三条,如图中所示。伺服马达三条线中红色的线是控制线,接到控制芯片上。中间的是SERVO工作电源线,一般工作电源是5V。 第三条是地线 5、伺服马达的运动速度 伺服马达的瞬时运动速度是由其内部的直流马达和变速齿轮组的配合决定的,在恒定的电压驱动下,其数值。但其平均运动速度可通过分段停顿的控制方式来改变,例如,我们可把动作幅度为90o的转动细分为128个停顿点,通过控制每个停顿点的时间长短来实现0o—90o变化的平均速度。对于多数伺服马达来说,速度的单位由“度数/秒”来决定。
+
100-P1-S2