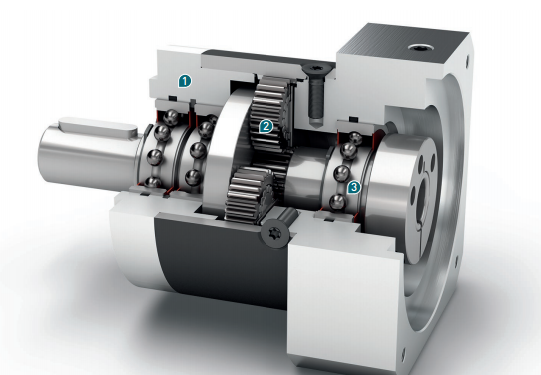
-S2-P2轴向行星式减速器
由于不同的产品规格和企业有不同的特征,国内海盐紧固件企业根据自身的实际情况选择了不同的出口模式。模式一:自营出口虽然自营出口的难度相对较大,但是近两年呈上升趋势,不同的企业根据不同的情况选择了不同的自营出口之路,有的企业通过参加展会等法主攻海外后市场;有的企业积极走访海外企业争取配套;有的企业则选择了先打后市场,再进入配套市场的法。自营出口的企业需要有一定的人力、物力、财力。一些较大的海盐紧固件企业与地方海盐紧固件协会联合组建专门的海外销团队,深入国外企业,借助当地的各种资源进行市场营销和后服务,虽然付出较多,但取得的效果很好。
减速特性
1、高扭力、耐冲击:行星齿轮之机构形同于传统平行齿轮的传动方式。传统齿轮仅依靠两个齿轮间极少数点接触面挤压驱动,所有负荷集中于相接触之少数齿轮面,容易产生齿轮间摩擦与断裂。而行星齿轮减速机具有六个更大面积与齿轮接触面360度均匀负荷,多个齿轮面共同均匀承受瞬间冲击负荷,使其更能承受较高扭矩力之冲击,本体及各轴承零件也不会因高负荷而损坏破裂。
2、体积小、重力轻:传统齿轮减速机的设计皆有多组大小齿轮偏向交错传动减速,由于减速比须由两个齿轮数之倍数值产生,大小齿轮间更要有一定之间距咬合,因此齿箱容纳空间极大,尤其高速比的组合时更需要由两台以上减速齿箱连接组合,结构强度相对减弱,更使齿箱长度加长,造成体积与重量极为庞大。行星减速机的结构可依需求段数重复连接,单独完成多段组合,体积小,重量轻、外观轻巧,相形使设计更有价值感。
伺服行星减速机的参数介绍
减速比
输出转速:输入转数
段/级数
行星齿轮的套数。由于一套行星齿轮无法满足较大的传动比,有时需要二套或三套来满足用户对较大传动比的要求,也就是说,减速比越大,段/级数越多,效率越低平均寿命
指减速机在额定负载下,额定输入转数时减速机的连续工作时间。
精度
在高速机械往复运动中到的关键在于尽量减少通过运动产生的角偏差。精度取决于两个值,一个是于加载有关的偏转角,涉及到回程间隙和扭转刚度;另一个是于运动控制有关的偏转角,涉及到同步偏差问题。
回程间隙齿隙
将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙。
额定输出扭矩
指减速机连续长时间工作时可以加载的力矩,条件应满足负载均匀,安全系数大于1.
加速扭矩
指工作周期每小时少于1000次时允许短时间加载.不能超过10000次。
紧急制动扭矩
指减速机输出端所能加载的力矩,这个力矩可在减速机寿命期内加载1000次,不能超过1000次。
空载扭矩
指加载到减速机上的以克服减速机内摩擦力的力矩。
扭矩
指减速机在静态条件或频繁启动条件下所能承受的输出扭矩,通常指峰值负载或启动负载。
实际所需扭矩
所需扭矩取决于应用场合的实际工况,拟选减速机的额定扭矩必须大于这个扭矩。
侧倾扭矩
指轴向力和径向力作用于输出端轴承上径向受力点的力矩。
轴向力
是指平行于轴心的一个力,它的作用点与输出轴端有一定的轴向偏差时,会形成一个额外的弯挠力矩。轴向力超过额定值时,需用联轴节来抵消这种弯挠力。
径向力
指垂直作用于轴向力的一个力,它的作用点与轴端有一定的轴向距离,这个点成一个杠杆点,横向力形成一个弯挠力矩。
轴伸径向载荷
选择减速机的附加依据是输出轴伸出端上的径向载荷和轴向载荷。轴的强度和轴承的承载能力决定了许用轴伸的径向载荷。产品样本中给出的允许值是指在 不利的方向作用在轴伸出端中点的力。当作用力不在中点时,越接近轴肩,允许的径向载荷就越大;相反,作用点离轴肩越远,允许的径向载荷就越小。
安全系数
安全系数等于减速机的额定输入功率与电机功率的比值。
使用系数
使用系数表现减速机的应用特性,它考虑到减速机的负载类型和每日工作时间。
力矩
减速机的以及电机与减速机的连接(输入轴采用性联轴器要求),都是有力矩要求。建议使用力矩扳手来完成步骤。
多电机驱动系统作为运动控制研究领域的重要内容之一,广泛应用于地铁,机车牵引,挤压机组,机器人等应用场合。而要推出性能优良的机车牵引,机器人等工业驱动以及综合电力舰船系统就需要解决同一直流母线电源和同一逆变器供电的多台电机独立运行问题[1]。 在过去的二十多年,越来越多的研究人员关注研究多相电机,因为多相电机相对于传统的三相电机存在诸多的显着优点,包括:减少转矩脉动,降低直流母线电流谐波含量,潜在的率,降低各相功率,由于较高的容错能力大大提高可靠性[2]。 常见的一种多相电机是双三相电机[3],而双三相永磁同步电机是目前研究较为广泛的一种多相电机,与传统的三相电机相比,双三相电机将基波电流产生的次谐波磁势提高到了11次,消除了对电机性能影响的5次、7次谐波磁势,大大减少了电机的转矩脉动,提升了电机性能[4]。所以我以双三相永磁同步电机为例来研究多相电机的多电机串联控制。 多相电机驱动控制策略中, 影响力和代表性的是基于空间矢量解耦的矢量控制。矢量控制方式的实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。简单的说,空间矢量控制就是通过坐标变换将交流电机模型等效为直流电机,实现磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。所以对双三相永磁同步电机空间矢量控制技术的研究具有一定的研究意义。
< 0-40-S2-P1
网友评论:(注:网友评论仅供其表达个人看法,并不表明盛丰建材网。)
查看更多评论