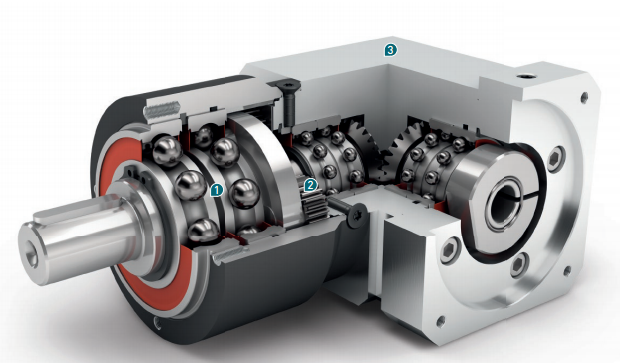
屯垦镇新机电:EAMON牌PLF120-L3-250-S2-P2 行星减速箱
在应力集中点附近要发生屈服。但小于2,故安定。扭转由《化工设备设计手册》第5章压力容器设计中孔附近的应力分析可知,具有小孔的受扭转作用的薄壁圆柱壳,拉应力出现在孔边与轴成的截面上,小孔的受扭转作用的圆柱壳其应力集中系数取4。不会发生屈服。内压p=15MPa作用由《应力集中系数手册》查得筒壁有小孔的厚壁圆筒承受内压时,可得应力集中系数A=3.3在应力集中点要发生屈服,但安定。卡环截面2-2处拉伸由《应力集中》书中诺谟图查得A=2.8在应力集中点(在圆角与内壁交接点)附近要发生屈服。
行星齿轮减速机传动的主要特点如下
1、运动平稳、抗冲击和振动的能力较强 由于采用了数个结构相同的行星轮,均匀地分布于中心轮的周围,从而可使行星轮与转臂的性力相互平衡。同轴减速机同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳,抵抗冲击和振动的能力较强,工作较可靠。
2、传动比较大,可以实现运动的与 只要适当选择行星齿轮传动的类型及配齿方案,便可以用少数几个齿轮而获得很大的传动比。在仅作为传递运动的行星齿轮减速机传动中,其传动比可达到几千。应该指出,行星齿轮传动在其传动比很大时,仍然可保持结构紧凑、质量小、体积小等许多优点。而且,它还可以实现运动的与以及实现各种变速的复杂的运动。
为了使行星轮间载荷分布均匀,起初,人们只努力提高齿轮的精度,从而使得行星轮传动的和转配变得比较困难。后来通过实践采取了对行星齿轮传动的基本构件径向不加限制的专门措施和其他可进行自动调位的方法,即采用各种机械式的均载机构,以达到各行星轮间载荷分布均匀的目的。从而,有效地降低了行星齿轮传动的精度和较容易转配,且使行星齿轮传动输入功率能通过所有的行星轮进行传递,即可进行功率分流。
在选用行星齿轮传动均载机构时,根据该机构的功用和工作情况,应对其提出如下几点要求:
(1)载机构在结构上应组成静定系统,能较好地补偿和转配误差及零件的变形,且使载荷分布不均匀系数 值。
(2)均载机构的补偿动作要可靠、均载效果要好。为此,应使均载构件上所受力的较大,因为,作用力大才能使其动作灵敏、准确。
(3)在均载过程中,均载构件应能以较小的自动调整位移量补偿行星齿轮传动存在的误差。
(4)均载机构应容易,结构简单、紧凑、布置方便,不得影响到行星齿轮传动性能。均载机构本身的摩擦损失应尽量小,效率要高。
(5)均载机构应具有一定的缓冲和减振性能;至少不应增加行星齿轮传动的振动和噪声。
以伺服马达为例,其伺服控制器通常包含速度控制器与扭矩控制器,马达通常类比式的速度回授信号,控制界面采用±10V的类比讯号,经由外回路的类比命令,可直接控制马达的转速或扭矩。采用这种伺服驱动器,通常必须再加上一个位置控制器(position controller),才能完成位置控制。
目前主要应用于工业界的伺服马达包括直流伺服马达、永磁交流伺服马达、与感应交流伺服马达,其中又以永磁交流伺服马达占绝大多数。控制器的功能在于整个伺服系统的闭路控制,如扭矩控制、速度控制、与位置控制等。 目前一般工业用伺服驱动器(servo drive)通常包含了控制器与功率放大器。 伺服驱动器包含了伺服控制器与功率放大器,伺服马达分辨率的光电编码器回授信号。
+
E 7-19DB19
K7-19FB19
K7-19DC19
EVB-060 -14HB16
-K7-14HB16
-K7-19EC16
网友评论:(注:网友评论仅供其表达个人看法,并不表明盛丰建材网。)
查看更多评论