-D1-S7低转速伺服变速器
数控机床是一种技术含量很高的机电仪一体化的机床,用户到一台数控机床后,是否正确的安全地机,调试是很关键的一步。这一步的正确与否在很大程序上决定了这台数控机床能否发挥正常的经济效率以及它本身的使用寿命,这对数控机床的生产厂和用户厂都是事关重大的课题。数控机床机,调试应按下列的步骤进行。电前的外观检查机床电器检查打机床电控箱,检查继电器,接触器,熔断器,伺服电机速度,控制单元插座,主轴电机速度控制单元插座等有无松动,如有松动应恢复正常状态,有锁紧机构的接插件一定要锁紧,有转接盒的机床一定要检查转接盒上的插座,接线有无松动,有锁紧机构的一定要锁紧。
矿串轴的其他原因:
1、精密行星减速机承受正负扭矩作用时,齿厚误差、齿面不均匀磨损和过早磨损、齿背变形造成串轴。
2、齿轮螺旋角误差造成串轴。中间轴和输出轴上两半从动人字齿轮,由于实际螺旋角的误差,会使人字齿轮对中线发生变化,造成串轴。
3、精密行星减速机齿轮偏斜造成串轴。中间轴上的从动齿轮偏斜可造成串轴。齿轮是以外圆和端面进行的,而齿轮装配是以内孔的,有时内孔与外圆不同心,或者内孔与端面不垂直,就会使的齿轮与内孔中心线出现偏斜。这种偏斜的人字齿轮,其对中线所在的平面与轴线不垂直,当齿轮旋转一周时,对中线上的某一点将会发生轴向往复串动一次,迫使输入轴也轴向往复串动一次。在实际传动中,由于两半从动齿轮的偏斜程度不同,对于输入轴来讲,产生轴向串动是中间轴上两半从动齿轮不同偏斜程度综合作用的结果。此外,输出轴上的从动齿轮,由于齿轮偏斜也同样造成串动,但是由于输出轴在轴向是固定的,就迫使中间轴,进而迫使精密行星减速机输入轴串动。
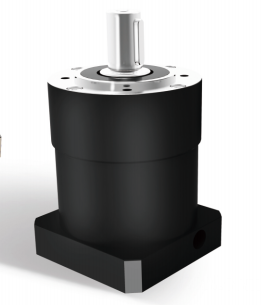
伺服行星减速机在机械手上的应用
机械手是为生产自动化周边专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;能够模仿人体上肢的部分功能替代重复的工作,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。提高数控机床和注塑机、压铸机及自动化设备的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到重要的作用。
三轴机械手:由X轴、Y轴、Z轴组成,X轴这个距离一般叫反冲行程,其大小和部件厚度有关。Y轴这个距离定义为垂直行程,是由机器高度和所需下降高度所决定的,也就是说,机械手必须足够高,以使部件能跳过机械,又要足够低,从而能在离地面合理的高度上放下部件;Z轴来回行程的大小有赖于机械手是在机械侧边还是在后边将部件放下。利用这种行程的部件只是为了跳过机器。
智能型机械手:该类型机械手一般包括多点记忆置放、任意点待机、较多自由度等功能,采用伺服驱动配精密行星减速机,能够进行限度的仿人执行比较复杂的操作,还可以通过配备 的传感器,让其具有视觉、触觉和热觉功能,使其成为具有很高智能的专用机器人。随着人工成本的增加以及效率的提高,机械手将成为自动化设备的必备辅机推动工业自动化的效率和提升企业收益。
关于交流伺服电机的几个问题:
问(A):交流同步伺服、交流异步伺服的额定转速与极数是否有关?n1=60f/2p?额定转速以下输出恒转矩,额定转速以上恒功率,那么额定转速的界定是由电机本身的机械决定还是驱动器来决定?
有关,同步转速n1=60f/2p,异步机还有滑差s,n=(1-s)n1,同步机n=n1,2p为极对数。控制中弱磁速度的界定是由驱动器判断的。
额定转速可以由几个方面决定:同步伺服的反电势高低、电机铁心材料允许的驱动电流交变频率、额定转矩下电机的功率、温升等, 主要还是反电势;异步电机主要受材料允许的频率以及极对数限制。
额定转速的界定由电机本身的机械和电器特性来决定。
-14BJ11
K7-19DB19
VRL-070 -14BM12
-K7-14BM12
-K7-19FB19
V 7-19HB19
-19DE19
K7-19EB19
VRL-070 -19EB16
-K7-19EB16 -K7-14BM14