-K7-16低转速伺服减速器
确认所要检测气体种类和浓度范围:每一个生产部门所遇到的气体种类都是不同的。在选择气体检测仪时就要考虑到所有可能发生的情况。如果 和其它性较小的烷烃类居多,选择LEL检测仪无疑是 为合适的。这不仅是因为LEL检测仪原理简单,应用较广,同时它还具有维修、校准方便的特点。如果存在 、 等有气体,就要优先选择一个特定气体检测仪才能保证工人的安全。如果更多的是有机有有害气体,考虑到其可能引起人员中的浓度较低,比如芳香烃、卤代烃、氨(胺)、醚、、脂等等,就应当选择前章介绍的光离子化检测仪,而不要使用LEL检测器应付,因为这可能会导致人员伤亡。
黄河涯镇 16低转速伺服减速器
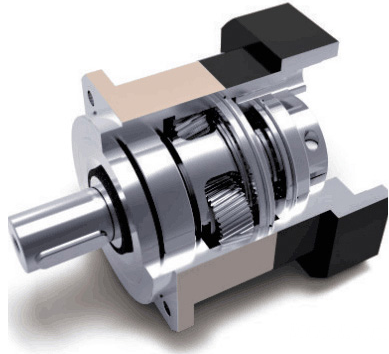
众所周知,一台机器通常是由三个基本部分组成:即动力机、行星减速机和工作机构。有时根据机器工作需要,可能还有控制系统和润滑、照明等辅助系统。行星减速机是指将动力机产生的机械能以机械的方式传送到工作机构上去的中间装置。
行星减速机在其中起到的作用是,降速同时提高输出扭矩,扭矩输出比例按电机输出乘减速比,但要注意不能超出行星减速机额定扭矩。另外,减速还降低了负载的惯量,惯量的减少为减速比的平方,其实大家都可以看一下,一般电机都会有一个惯量数值的。
黄 K7-16低转速伺服减速器
目前,伺服驱动器已占据了机床进给伺服的主导地位,并随着新技术的发展而不断完善,具体体现在三个方面。一是系统功率驱动装置中的电力电子器件不时向高频化方向发展,智能化功率模块得到普及与应用;二是基于微器嵌入式技术的幼稚,将促进 控制算法的应用;三是网络化模式的推广及现场总线技术的幼稚,将使基于网络的伺服控制成为可能。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组合为降速传动,传动比一般为1.25~1.67,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。第六种组合方式,由于升速较大,主被动件的转向相反,在汽车上通常不用这种组合。其余的七种组合方式比较常用。
黄河涯镇传动装置:行星式AXF090-L2-25-K7-16低转速伺服减速器
+
0-100-P2
0-100-P2
5-020-P2
0-100-P1
5-020-P1
0-100-P2
5-020-P2
0-100-P1
5-020-P1
0-100-P2
根据虚拟人的建模要求,合理地考虑骨骼模型和皮肤模型;建模过程应严格按照H-Anim标准进行。人体的行为模型应采用层次化的人体运动模型,建立固定在人体根节点处的固定坐标系和附在各关节点处的运动坐标系,对人的动作进行描述。人的运动学模型应严格遵守H-Anim标准。虚拟人的动画存储应遵照MPEG-4标准。2虚拟场景的建模要求虚拟场景中具有交互功能的物体建模,应优先使用基于图形的建模方式;交互性要求比较低的物体或景物建模,应使用基于图像的建模方式或基于图形、图像混合的建模方式;而当重点研究工作环境对人体的影响,特别是视觉方面的影响时,也可以采用基于图形、图像混合的建模方式;不宜在VRML环境下直接建模;在人机工程应用中,应采用比较合理的三维建模软件进行建模,再转化到虚拟环境中。3虚拟现实系统的绘制要求对于不同场景的绘制,视觉绘制系统的时间延迟应控制在可忍受的范围内,视觉绘制时间延迟临界值为1ms,绘制系统的帧率不应低于1帧/秒。视觉绘制系统应根据系统配置和应用特点,选择相应的图形学标准,使用过程中要注意图形学标准的通用性和功能的性。听觉绘制方式的选择首先要考虑所要模拟的对象本身的要求,根据不同的场景要求采用不同的绘制方式。声音的生成设备要与声音的绘制方式一致。