新河镇新机电:EAMON牌ZAF140-L2-16-K9-35机器人行星变速箱
弧齿锥齿轮作为汽车驱动桥主减速器的关键零部件,其质量精度直接决定着整桥的质量水平。弧齿锥齿轮,工件的想平面齿轮节线是圆弧的一部分。弧齿锥齿轮的方式有很多种,主要包括展成法、成型法等。目前广泛应用的是展成法,又可以分为单号双面切齿法、简单双面切齿法、固定切齿法、单号双面切齿法及双重双面切齿法。根据想平面齿轮的概念,我们可以利用盘刃运动的轨迹代替想平面齿轮上的轮齿,利用被齿轮与想平面齿轮相啮合的运动切制出锥齿轮。
减速特性
1、高扭力、耐冲击:行星齿轮之机构形同于传统平行齿轮的传动方式。传统齿轮仅依靠两个齿轮间极少数点接触面挤压驱动,所有负荷集中于相接触之少数齿轮面,容易产生齿轮间摩擦与断裂。而行星齿轮减速机具有六个更大面积与齿轮接触面360度均匀负荷,多个齿轮面共同均匀承受瞬间冲击负荷,使其更能承受较高扭矩力之冲击,本体及各轴承零件也不会因高负荷而损坏破裂。
2、体积小、重力轻:传统齿轮减速机的设计皆有多组大小齿轮偏向交错传动减速,由于减速比须由两个齿轮数之倍数值产生,大小齿轮间更要有一定之间距咬合,因此齿箱容纳空间极大,尤其高速比的组合时更需要由两台以上减速齿箱连接组合,结构强度相对减弱,更使齿箱长度加长,造成体积与重量极为庞大。行星减速机的结构可依需求段数重复连接,单独完成多段组合,体积小,重量轻、外观轻巧,相形使设计更有价值感。
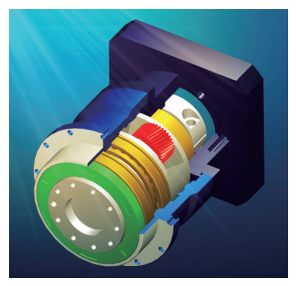
行星减速步进电机的主要结构及特点: 行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速为3,一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比减速机有4级减速。 相对其他减速机,行星减速机具有高刚性,高精度(单级可到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点。 因为这些特点,行星减速机多数是在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量。 减速步进电机额定输入转速可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可到10000Nm以上。工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度。 行星减速器内部齿轮采用20CrMnTi渗碳淬火和磨齿具有体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低、输出扭矩大,速比大、效率高、性能安全的特点。兼具功率分流、多齿啮合独用的特性。是一种具有广泛通用性的新型减速机。输入功率可达104kW。
交流伺服系统具有共振功能,可涵盖机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检测出机械的共振点便于系统调整。 4、矩频特性不同;步进电机的输出力矩会随转速升高而下降,交流伺服电机为恒力矩输出,5、过载能力不同;步进电机一般不具有过载能力,而交流电机具有较强的过载能力。 6、运行性能不同;步进电机的控制为环控制,启动频率过高或负载过大易丢步或堵转的
现象,停止时转速过高易出现过冲现象,交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。 7、速度响应性能不同;步进电机从静止加速到工作转速需要上百毫秒,而交流伺服系统的加速性能较好,一般只需几毫秒,可用于要求快速启停的控制场合。
+<