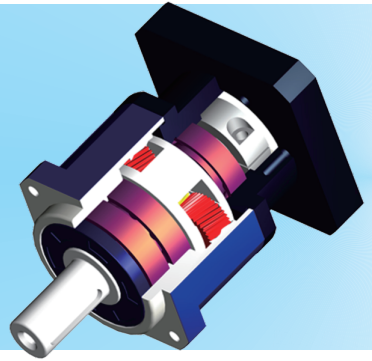
小平王乡新机电:伺服式ZAF115-L1-3-K6-19斜齿行星式减速器
未来,市场需要越来越人性化的照明,可变色温也将成未来灯具的新发展趋势。灯具设计是LED未来战斗的方向萧弘清强调,灯具设计是LED未来战斗的方向,在外观设计上,对称型的灯具是未来的主流趋势。目前液晶面板进入照明领域的盲点是其对辉度和照度的控制失误。灯具的配光很大程度上决定了光污染程度,正确的灯具必须被正确地才能发挥的作用,否则将直接抹杀灯具的寿命。萧弘清劝告国内LED照明企业,不要过度依赖补贴,更不要盲目撒钱。
矿串轴的其他原因:
1、精密行星减速机承受正负扭矩作用时,齿厚误差、齿面不均匀磨损和过早磨损、齿背变形造成串轴。
2、齿轮螺旋角误差造成串轴。中间轴和输出轴上两半从动人字齿轮,由于实际螺旋角的误差,会使人字齿轮对中线发生变化,造成串轴。
3、精密行星减速机齿轮偏斜造成串轴。中间轴上的从动齿轮偏斜可造成串轴。齿轮是以外圆和端面进行的,而齿轮装配是以内孔的,有时内孔与外圆不同心,或者内孔与端面不垂直,就会使的齿轮与内孔中心线出现偏斜。这种偏斜的人字齿轮,其对中线所在的平面与轴线不垂直,当齿轮旋转一周时,对中线上的某一点将会发生轴向往复串动一次,迫使输入轴也轴向往复串动一次。在实际传动中,由于两半从动齿轮的偏斜程度不同,对于输入轴来讲,产生轴向串动是中间轴上两半从动齿轮不同偏斜程度综合作用的结果。此外,输出轴上的从动齿轮,由于齿轮偏斜也同样造成串动,但是由于输出轴在轴向是固定的,就迫使中间轴,进而迫使精密行星减速机输入轴串动。
原因及对策
1.误差影响
过程齿形误差、齿距误差、齿向误差是导致传动噪声的主要误差。也是齿轮传动精度难以保证的一个问题点。
齿形误差小、齿面粗糙度小的齿轮,在相同试验条件下,其噪声比普通齿轮要小10dB。齿距误差小的齿轮,在相同试验条件下,其噪声级比普通齿轮要小6~12dB。但如果有齿距误差存在,负载对齿轮噪声的影响将会减少。
齿向误差将导致传动功率不是全齿宽传递,接触区转向齿的这端面或那个端面,因局部受力增大轮齿挠曲,导致噪声级提高。但在高负载时,齿变形可以部分弥补齿向误差。
齿轮噪声的产生与传动精度有很直接的关系。
2.装配同心度和动平衡
装配不同心将导致轴系运转的不平衡,且由于齿论啮合半边松半边紧,共同导致噪声加剧。高精度齿轮传动装配时的不平衡将严重影响传动系统精度。
3.齿面硬度
随着齿轮硬齿面技术的发展,其承载能力大、体积小、重量轻、传动精度高等特点使其应用领域日趋广泛。但为获得硬齿面采用的渗碳淬硬使齿轮产生变形,导致齿轮传动噪声增大,寿命缩短。为减少噪声,需对齿面进行精。目前除采用传统的磨齿方法外,又发展出一种硬齿面刮削方法,通过修正齿顶和齿根,或把主被动轮的齿形都调小,来减少齿轮啮入与啮出冲击,从而减少齿轮传动噪音。
4.系统指标检定
在装配前零部件的精度及对零部件的选法(完全互换,分组选配,单件选配等),将会影响到系统装配后的精度等级,其噪声等级也在影响范围之内,因此,装配后对系统各项指标进行检定(或标定),对控制系统噪声是很关键的。
交流伺服电机也是由定子和转子构成。它的定子的构造基本上与电容分相式单相异步电动机相似,其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。