建造未来机械品:EAMON牌BL060A-L1-7-D1-S4伞齿行星减速机
其次,市场竞争为消费者的消费选择创造更多可能,从产品数量看,选择更多元,从单品类看,的产品追求催生更多 的产品。分居消费者对消费品质、价格等不同需求,各类个性化的营销方式在过去一年层出不同。营销216年行业营销盘点头号竞争砝码——品牌营销品牌作为企业的无形资产,一直被认为是现代商业市场的头号竞争砝码。行业人士认为,一个强而有力的品牌,本身就是一名消费者所属知的绝大部分,进入市场首先被人所熟知和认同都会为企业抢得先机。
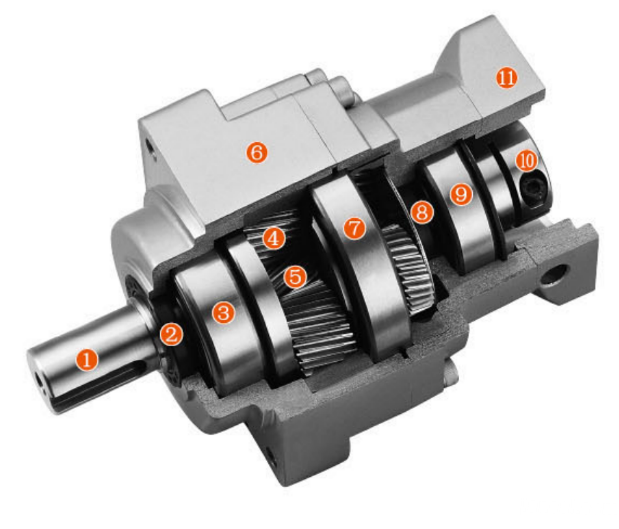
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组 向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
设计原因及对策
1.齿轮精度等级
齿轮传动系统设计时,设计者往往从经济因素考虑,尽可能比较经济的确定齿轮精度等级,殊不知精度等级是齿轮产生噪声等级与侧隙的标记。美国齿轮协会曾通过大量的齿轮研究,确定高精度等级齿轮比低精度等级齿轮产生的噪声要小的多。因此,在条件允许的情况下,应尽可能提高齿轮的精度等级,来减小齿轮噪声,减少传动误差。
2.齿轮宽度
在齿轮传动系统允许时,增加齿宽,可以减少恒定扭矩下的单位负荷。降低轮齿挠曲,减少噪声激励,从而降低传动噪声。德国H奥帕兹的研究表明,扭矩恒定时,小齿宽比大齿宽噪声曲线梯度高。同时增长齿宽能加大齿轮的承载能力。
3.齿距和压力角
小齿距能保证有较多的轮齿同时接触,齿轮重叠增多,减少单个齿轮挠曲,降低传动噪声,提高传动精度。较小的压力角由于齿轮接触角和横向重叠比都比较大,因此运转噪声小、精度高。
步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。一旦三大要素确定,步进电机的型号便确定下来了。 1、步距角的选择
电机的步距角取决于负载精度的要求,将负载的分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。目前市场上步进电机的步距角一般有0.36度/0.72度(五相电机)、0.9度/1.8度(二、四相电机)、1.5度/3度 (三相电机)等。 2、静力矩的选择 步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。单一的惯性负载和单一的摩擦负载是不存在的。直接起动时(一般由低速)时二种负载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸) 3、电流的选择 静力矩一样的电机,由于电流参数不同,其运行特性差别很大,可依据矩频特性曲线图,判断电机的电流(参考驱动电源、及驱动电压) 4、力矩与功率换算 步进电机一般在较大范围内调速使用、其功率是变化的,一般只用力矩来衡量
+
S3-48MB42
VRB-220 -28HA22
-S3-28HA22
-S3-28HB22
网友评论:(注:网友评论仅供其表达个人看法,并不表明盛丰建材网。)
查看更多评论