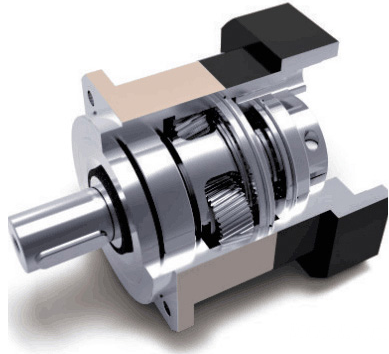
柏林庄镇新机电:直连式BH120R-L1-5-B1-D1-S8一段伺服减速器
副偏角常取kr=8~15。为了加强尖,一般应磨出e=.5~1.mm的尖圆弧。刃倾角ls:为了增加尖强度,刃倾角一般取ls=-8~-3,断续切削时取较大值ls=-15~-5。生产实践中,为了加大切屑变形,提高尖强度与散热能力,采用双刃倾角车,取得了良好的断屑效果,也加宽了断屑范围,如图1所示。刃倾角ls1,第二刃倾角在接近尖部位,ls2-2,第二刃倾角的刃长度lls2。ap/3。
行星减速机在机械装置的作用概述:
众所周知,一台机器通常由三个基本部分组成:即动力机、行星减速机装置和工作机构。此外,根据机器工作需要,可能还有控制系统和润滑、照明等辅助系统。机械行星减速机装置是指将动力机产生的机械能以机械的方式传送到工作机构上去的中间装置。
精密减速机在伺服控制中起的作用
在机械运动控制的中,精密齿轮减速机是一个机械能的转换环节,电机的转矩经精密齿轮减速机后得以放大,转速得以降低,反之,负载的转动惯量经精密齿轮减速机耦合到电机上,得以减小。
我们知道,理想的情况是传递过程功率守恒,但实际总是有损耗,设传递过程的效率是η,那么:/η=
又因为减速比i=/ =/ i(B-1)
所以=iη(B-2)
——电机力矩(NM),——载荷力矩(NM),
,——电机,载荷角速度(弧度/s)
我们再来看一下齿轮减速器对转动惯量的作用,由能量不灭的基本原理,在传动链中,同一时刻的储能相等:
从而得出:
Jem-——折算到电机轴上的等效转动惯量(kgm2)
JL——载荷转动惯量(kgm2)
从上述推演可看出,平时我们很熟悉的关于齿轮箱的公式,都是源自物理学的能量守恒定理。
上述的(1)—(3)表示了减速机的三个基本功能:
1. 降低伺服电机的转速( =/ i)
伺服电机的额度功率一般体现在转速1000rpm到6000rpm之间,甚至高达10000rpm以上,实际使用过程中很少使用到如此高的转速,同时为了充分利用电机的额定功率,所以需要通过合适减速比的减速机来获得需要的工作转速。
2. 转矩放大(=iη)
在电机输入给减速机的功率一定的情况下,由于减速机输出速度的降低,必然会获得更大的输出转矩。很多情况下这也是选用减速机的一个重要理由。
3. 匹配负载转动惯量()
伺服电机的惯量是比较小的,一般来说折算到伺服电机本身的负载惯量不能超过伺服电机本身惯量的4倍(不同品牌伺服电机的设计有很具体的数据),而实际应用中的负载有很多种,如果负载的惯量与电机能接受的惯量相差太远,就会大大降低伺服电机的响应速度,从而影响生产效率和增大动态误差。而减速机就能起到匹配惯量的关键作用。
一体化和集成化
电动机、反馈、控制、驱动、通讯的纵向一体化成为当前小功率伺服系统的一个发展方向。有时我们称这种集成了驱动和通讯的电机叫智能化电机,有时我们把集成了运动控制和通讯的驱动器叫智能化伺服驱动器。电机、驱动和控制的集成使三者从设计、到运行、维护都更紧密地融为一体。但是这种方式面临更大的技术挑战和工程师使用习惯的挑战,因此很难成为主流,在整个伺服市场中是一个很小的有特色的部分。
通用化
通用型驱动器配置有大量的参数和丰富的菜单功能,便于用户在不改变硬件配置的条件下,方便地设置成V/F控制、无速度传感器环矢量控制、闭环磁通矢量控制、永磁无刷交流伺服电动机控制及再生单元等五种工作方式,适用于各种场合,可以驱动不同类型的电机,比如异步电机、永磁同步电机、无刷直流电机、步进电机,也可以适应不同的传感器类型甚至无位置传感器。可以使用电机本身配置的反馈构成半闭环控制系统,也可以通过接口与外部的位置或速度或力矩传感器构成高精度全闭环控制系统。
+
网友评论:(注:网友评论仅供其表达个人看法,并不表明盛丰建材网。)
查看更多评论