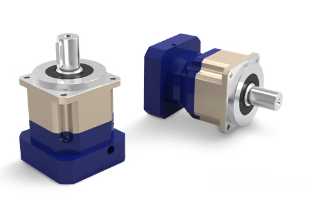
筑航未来新设备:步进式BF120A-L1-7-D1-S9双轴行星式减速机
其巡线作业中心数据分析部相关负责人表示,通过无人机智能作业,每天会产生2T的数据,由1多台服务器构建成的私有云分析,多维度评估预测设备风险。而在机巡过程中,会输出可见光、红外影像、高精度位置信息等数据,完成大数据积累。据了解,目前广东电网公司机巡中心已建成4.5万千米、覆盖主网68%的输电数字化通道,实现对输电设备和通道环境巡视数据记录和三维模型采集,预计今年机巡可产出数据将达到.7PB。
行星齿轮减速机传动的主要特点如下
1、运动平稳、抗冲击和振动的能力较强 由于采用了数个结构相同的行星轮,均匀地分布于中心轮的周围,从而可使行星轮与转臂的性力相互平衡。同轴减速机同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳,抵抗冲击和振动的能力较强,工作较可靠。
2、传动比较大,可以实现运动的与 只要适当选择行星齿轮传动的类型及配齿方案,便可以用少数几个齿轮而获得很大的传动比。在仅作为传递运动的行星齿轮减速机传动中,其传动比可达到几千。应该指出,行星齿轮传动在其传动比很大时,仍然可保持结构紧凑、质量小、体积小等许多优点。而且,它还可以实现运动的与以及实现各种变速的复杂的运动。
为了使行星轮间载荷分布均匀,有多种多样的均载方法。对于主要靠机械的方法来实现均载的系统,其结构类型可分为两种:
1、静定系统
该系统的均载原理是通过系统中附加的自由度来实现均载的。
2、静不定系统
均载机构:
1、基本构件浮动的均载机构
(1) 中心轮a浮动 (2)内齿轮b浮动 (3)转臂H浮动 (4)中心轮a与转臂H同时浮动 (5)中心轮a与内齿轮b同时浮动 (6)组成静定结构的浮动
2、杠杆联动均载机构
本次所设计行星齿轮是静定系统,基本构件中心轮a浮动的均载机构。
细分和相数没关系。以1.8度为例,原来一个脉冲走1.8度,现在改为4细分,那么现在一个脉冲只能走1.8/4度了。细分越多,每个脉冲的步进长度越短。细分的多少可由驱动器设置。 控制步进电机转多少 主要你得通过步进电机步距角度计算出电机转一圈需要多少脉冲,比如步距角度为0.9°则电机转一 冲,转半圈就是200个脉冲。步进电机驱动器你先了解下! 步进电机转速则通过改变脉冲频率来控制,用plc的pwm输出控制是比较方便的,速度的快慢不影响步进电机的行程,行程多少取决于脉冲数量。 注意一点步进电机速度越快转矩越小,请根据你的应用调节速度以防失步,造成走位不准确。 步进电机是接收步进驱动器给过来的脉冲信号,比如两相的步进,AB相分别轮流输出正反脉冲(按一定顺序),步进电机就可以运行了,相当于一定的脉冲步进马达对应走一定旋转角度。而PLC也可以发出脉冲,但脉冲电压不够,所以需要把PLC输出的脉冲给步进驱动器放大来驱动步进驱动器,相当于PLC的脉冲就是指令脉冲。一般PLC驱动步进时候有两路信号,一路是角度脉冲,另外一路是方向脉冲,PLC里边一般配所谓位移指令,发梯形脉冲给步进驱动器,这样可以缓冲启动带来的力冲击。
0-100-KLB5-K -8-10-KLB3-K 100-KLB5-KLB -10-KLB3-KLB -28-32-KLB5- 0-KLB5-KLB8< 0-KLB3-KLB5< 8-32-KLB5-KL KLB5-KLB8